

التوافق مع محرك PiThrust FOC: تم اختباره على مقاعد البدلاء في جميع الطرازات السبعة
A real problem sparked this test
Six months ago, for example, a customer in Germany paired 4315-600KV motors with a brand-name FOC ESC. The motors kept losing sync during slow hovering.
Naturally, the ESC manufacturer blamed the motors. We asked him to ship one back for testing instead.
The motor was fine — the ESC defaults were wrong
On our bench, however, the motor checked out: perfect winding balance, clean bearings, consistent inductance across all three phases. In fact, the real problem was that the ESC's default FOC parameters were tuned for 2300KV racing motors, not 600KV industrial ones.
This mismatch happens more often than it should
On one hand, motor manufacturers say their motors work with FOC. On the other, ESC manufacturers claim their controllers work with any BLDC motor. Nevertheless, neither side gives you the data to verify. That gap, in short, is exactly why we ran this test series.
Why FOC Compatibility Isn't Just Marketing Talk
FOC is harder on the motor than six-step
Specifically, a motor that runs perfectly on a basic trapezoidal ESC can confuse a FOC controller. The symptoms are subtle: motors run hotter, lose sync at low RPM, and efficiency gains never materialize.
In reality, motors don't smoke. Instead, they just underperform in ways that are hard to diagnose without controlled testing.
Three things, in practice, determine real FOC performance
Specifically: winding balance, magnetic material, and bearing precision. We'll come back to each. But first — the numbers.
What we covered before this test
In our earlier deep dive on how AI is changing UAV motor control, we covered the theory of FOC versus six-step commutation and showed efficiency gains of 12–22% with the 5315-420KV.
This article, however, goes further: raw compatibility data across every motor in our lineup, starting with the one customers ask about most.
The Test Setup — No Lab Tricks
Why we used generic firmware
We tested on a calibrated thrust stand with a third-party FOC ESC running open-source firmware — not a manufacturer-tuned unit. If a motor passed on generic FOC parameters, it would pass on anything.
If it struggled, that told us something real about the motor, not the ESC.
Four measurements across the throttle range
- Spin-up smoothness: 5% to 100% throttle in 5% increments
- Current ripple: amplitude at steady state
- Winding temperature: after 10 minutes at 70% throttle
- Sync-loss behavior: during rapid throttle changes
All tests used 15×7.3×3 three-blade propellers, with controlled ambient at 25°C.
4315-600KV: What the Full Throttle Data Says
Why the 4315 is our benchmark motor
It's our most popular motor for inspection and security UAVs — applications where stable hovering and smooth video matter more than raw thrust. Indeed, if FOC makes a difference anywhere, it's here.
4315-600KV Specifications
8S input | NSK bearings | N52H magnets | 218g weight | 24.4mΩ internal resistance | 7,200g max thrust
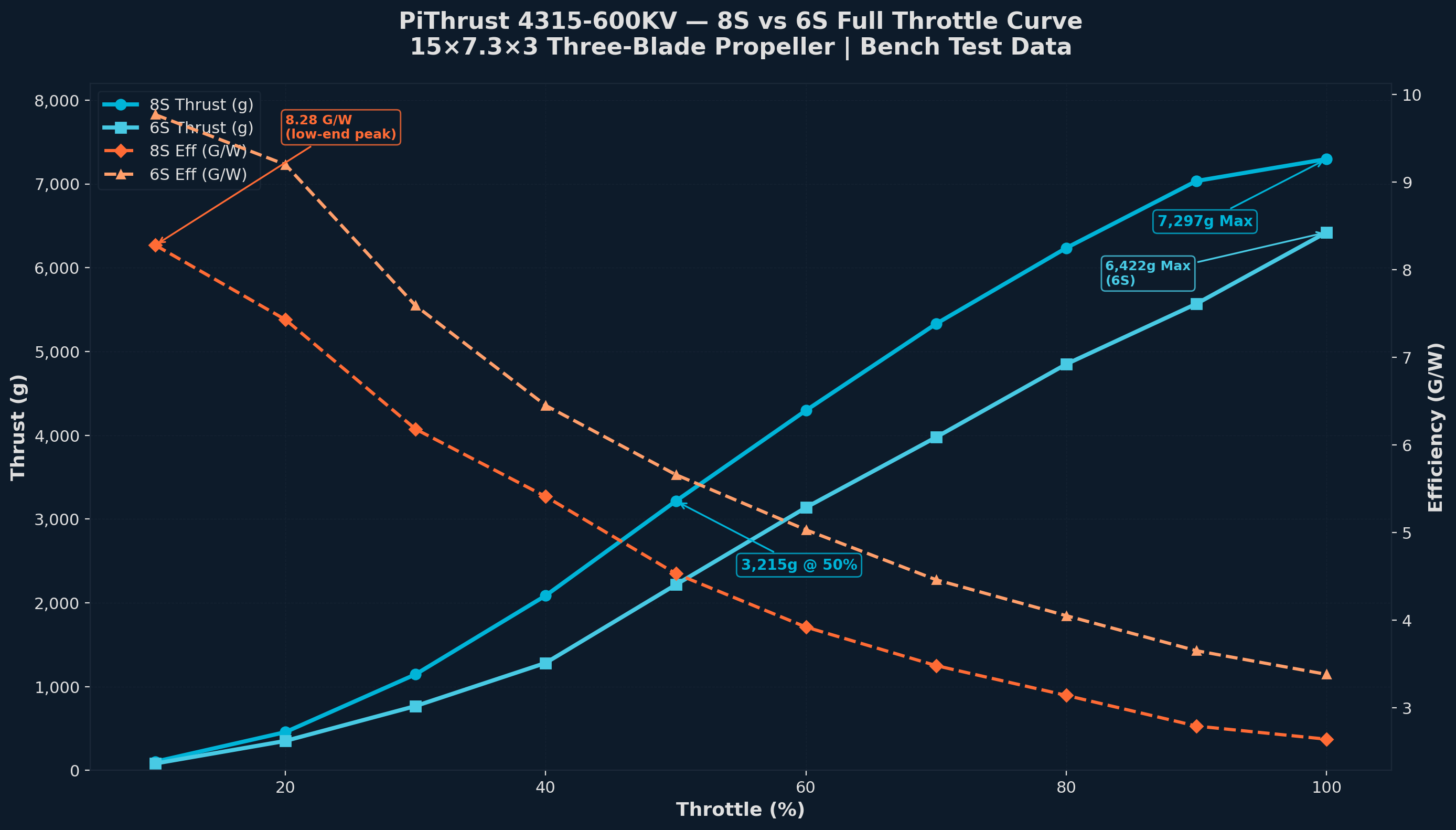
8S performance from 10% to 100% throttle
At 10% throttle, the 4315 pulled just 0.39A at 32V — barely 12.6 watts — and produced 104g of thrust. At that low end, efficiency hit 8.28 G/W.
By 50% throttle, it was making 3,215g at 709W. At full throttle, it peaked at 7,297g on 2,767W, 93A.
The critical finding: no sync loss at any throttle step from 10% to 100%. Current ripple stayed under 3% across the entire range. That's the motor doing exactly what the controller asks.
6S comparison — what changes at lower voltage
At 6S with the same 15-inch tri-blade, the 4315 topped out at 6,422g on 1,902W. Interestingly, low-end efficiency was actually higher — 9.77 G/W versus 8.28 on 8S.
But torque fell off faster at the top end. Therefore, if you're running FOC on 6S, plan your payload around the 50-70% throttle sweet spot where efficiency holds above 5 G/W.
All 7 Motors: FOC Compatibility at a Glance
Same protocol, every motor
We ran every motor in the lineup through the same test protocol. Here's the summary.
What the ratings tell you
In the end, five out of seven motors scored five stars. The 5215, however, showed minor stutter below 15% throttle on generic firmware — not a dealbreaker, but worth noting.
If you're running 5215 motors with FOC on an agricultural drone, make sure your ESC firmware has been tuned for low-KV, high-pole-count motors. Otherwise, the defaults won't cut it at the bottom of the throttle range.
What Makes a Motor FOC-Ready: 3 Things That Actually Matter
The data shows which motors work — but why?
After hundreds of bench hours, we've identified three factors that separate a FOC-ready motor from one that just happens to spin.
Winding Balance: The Silent Killer of FOC Performance
FOC controls current independently on each phase. If one phase has slightly higher resistance, the controller overcompensates, and that phase runs hotter.
On six-step, you'd never notice a 5% resistance mismatch. On FOC, however, that mismatch shows up as heat, noise, and eventually insulation failure.
Every PiThrust motor uses hand-wound stators with balanced three-phase windings and 220°C-rated copper wire. Furthermore, we test phase resistance on every motor. The delta between phases must stay under 2%, or it doesn't ship.
Magnetic Material: N52H vs Everything Else
Magnets lose strength as they heat up. N52H holds its magnetic flux density up to 120°C — well above what most drone motors see in normal operation.
By contrast, cheaper N35 or ferrite magnets start fading at 80°C. When the flux weakens, the FOC controller sees a different motor than it calibrated for. Efficiency drops, current ripple increases, and the motor runs hotter in a feedback loop.
We've seen N35 motors lose 8-12% of their effective thrust after 200 hours of agricultural spraying. Meanwhile, N52H holds within 3% over the same period.
Bearing Precision: It Affects the Sensorless Estimate
FOC uses the motor's back-EMF to estimate rotor position — no Hall sensors needed. The back-EMF signal quality depends on how smoothly the rotor spins.
A bearing with 5-micron runout produces a cleaner signal than one with 15-micron runout. That difference translates directly to how well the controller tracks rotor angle at low RPM.
Japanese NSK bearings — standard on every PiThrust motor — have tighter manufacturing tolerances than generic alternatives. The chain reaction: bearing quality → signal quality → control quality → efficiency.
Field Notes From Real FOC Conversions
Case 1: LiDAR Surveying in Australia
A surveying company runs 4312-380KV motors on a 12S octocopter carrying LiDAR. They switched from trapezoidal ESCs to FOC six months ago.
As a result, flight logs now show 14% less energy per square kilometer mapped. Vibration-related gimbal corrections dropped by almost half. Consequently, the LiDAR point cloud density improved because the platform was simply more stable in the air.
Case 2: Agricultural Spraying in Brazil
An operator runs 5315-420KV motors on a fleet of eight spraying drones — 20-liter tanks, 12S, 30-minute missions. They converted to FOC in January.
After the switch, motor replacement rate dropped from roughly one per month per drone to one every four months. In other words: the motors stayed the same, but the ESCs changed — and that alone more than paid for the upgrade.
Case 3: The 5215 Cautionary Tale
We had a customer who paired 5215-420KV motors with an ESC whose FOC firmware hadn't been tuned above 300KV. The controller hunted for the right current angle throughout the flight. Motors ran 12°C hotter than they should have.
After switching to an ESC with properly configured motor parameters, temperatures dropped and sync stabilized. The lesson: FOC compatibility is a system property, not a motor property.
Which Motor With Which ESC: A Quick Guide
What to ask your ESC supplier
This isn't a list of specific ESC brands. It's about what to verify before you commit to a propulsion stack.
Frequently Asked Questions
Can I use any FOC ESC with PiThrust motors?
Most modern FOC ESCs will work, but check two things. First, the ESC's motor parameter detection needs to handle your specific KV and pole count. Second, the firmware should support low-RPM sensorless startup if you're running inspection or mapping applications.
Our test data shows five of seven models work on generic FOC firmware without issues. The 5215 and 4320, however, benefit from per-motor tuning.
Why did the 5215 show low-RPM stutter on your test?
The 5215 has a higher pole count and lower inductance than the 4312/4320 family. Because of this, generic FOC firmware defaults aren't optimized for this combination.
It's a firmware issue, not a motor defect. With properly configured parameters — specifically higher observer gain at low speed — the stutter disappears.
What efficiency improvement should I realistically expect?
On the 5315-420KV, we measured 12–22% across the 40–70% throttle band where most industrial drones operate. Similarly, the 4315-600KV showed comparable gains at partial throttle.
If someone promises 30% or more, however, ask for their test conditions. Real gains are real, but they're not magic.
Do I need to replace my motors to switch to FOC?
Almost certainly not. If your PiThrust motors are running on trapezoidal ESCs, they'll work on FOC — in fact, potentially much better.
The upgrade is just the ESC, or sometimes just a firmware update. The motor hardware doesn't change. What does change is how precisely the controller drives it.
Which PiThrust motor gives the best FOC efficiency?
At 10% throttle on 8S, the 4315-600KV delivered 8.28 G/W — the highest in our test at that throttle point.
Over the full range, the 5008-300KV runs the coolest at 62°C sustained and shows the lowest ripple. In the end, different motors optimize for different things. So pick based on your application.
Next Steps When You Need Help
When compatibility questions get technical
For custom motor winding modifications, specific ESC recommendations, or FOC tuning guidance, reach out with your project details.
What to send for a recommendation
Send your motor model, ESC brand and firmware version, propeller size, battery voltage, and the specific throttle range where you're seeing issues.
